





电机霍尔开关位置检测中的方法
现代永磁同步交流伺服系统一般采用编码器作为转子位置检测装置。光电编码器分为增量式和绝对式,而增量式编码器与绝对式编码器相比,具有成本低、接线简单、可靠性高等优点,广泛运用于各类工业场合。由于伺服系统数字控制处理器只能对增量式编码器发出的脉冲进行累加计数,根据计数值及初始值来计算当前转子位置,因此,初始定位值的精确程度是保证矢量控制正常稳定运行的前提。
以增量式编码器作为转子位置检测手段回的各类伺服系统进行初始定位过程中,大多运用到霍尔开关检测转子初始位置,故霍尔开关安装位置检测成为何服系统配装电机必须经历的步骤。
随着永磁同步电机伺服系统朝着智能化发展,需要一种自动检测手段代替传统人工霍尔检测方法,自动检测霍尔开关安装位置技术以其执行效率高、智能化、精度高等有点,具有很高的实用价值。
基于Id=0矢量控制的水磁同步交流伺服系统需要实时检测转子位置,而绝对式编码器只能获得相对位置信号,所以必须在初始时刻获取参考位置以确定转子空间位置,以便在运行中累加增量计数脉冲以计算转子的绝对位置。为了减小初始时刻转子获取参考位置的转动行程,多数伺服电机安装了三伺服系统通过检测三个霍尔开关的值进而检测转子的空间区位,然后通过其中该区的初始定位电压矢量把转子固定此区的角平分上。
由于给定定位电压矢量要预先知道三个霍尔开关的安装位置当作参考位置,因而检测霍尔安装位置的精度就成了矢量控制正常运行的前提条件。传统的办法是利用外力驱动电机转子使其处于发电机状态,利用示波截取反电势波形和霍尔信号波形,通过测量反电势正弦波和霍尔信号相位差进行计算。
霍尔自动检测方法
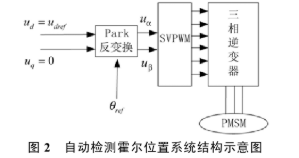
这里介绍的自动检测方法,结构如图2所示,软件流程如图3所示。在电机未知霍尔空间设置且空载情况下,将电机置于开环运行状态,使得Uq。为0、U。为固定值,PARK 反变换角度给定固定值,此时电机转子磁场方向应与定子给定电压矢量方向一致,也就是通常初始定位的状态。由于转子初始位置未知,故给定单一参考电压矢量有时未必能把转子牵引到指定位置,这里给定θref先给定90°,再给定0°,以保证转子初始任意位置都能准确定位。
缓慢增加给定角度θref,系统观测霍尔值变化,当转子由一个霍尔扇区跨越到另外一个扇区时, 霍尔值会发生变化。待电机转子旋转一周后, 霍尔值变化六次,记下每次变化时的编码器的读数,这六个边界正是三个霍尔把空间分成的六个扇区的分界线,因此每个扇区的角平分线即所求得的霍尔值。

现代通用交流伺服驱动器往往要适应不同类型的伺服电机,采用增量式编码器作为位置检测手段的永磁同步伺服电机在换装电机之前需要测量霍尔开关的安装位置,传统采用人工检测方法不仅效率低,而且精度差,已不能适应伺服系统智能化、高效化的要求。本文提出了一种基于矢量控制的水磁同步电机霍尔安装位置自动检测的方法,通过实验证明此方法可以在短时间内完成新换装电机霍尔安装位置的自动检测,不需要人工操作,应用环境更广,不需要检测设备,是一种实用性霍尔位置检测手段。
“推荐阅读”
【责任编辑】: 华芯霍尔元件版权所有:https://www.wxhxkj.com/转载请注明出处






 华芯霍尔元件微信
华芯霍尔元件微信 华芯霍尔元件微博
华芯霍尔元件微博 移动官网
移动官网