





霍尔开关在辊轮转向和行程测量装置中的应用
特种设备中架桥机、额定载荷100t以上的门式起重机、冶金用起重机等必须安装安全监控管理系统,其中大车行程、小车行程、起升高度等是必须监控的重要参数。当前普遍采用行程或起升高度测量传感器一般为旋转编码器,编码器通过联轴器与卷简或行走轮的输出轴连接并同步旋转,监控系统通过采集旋转编码器的脉冲数测量卷简或行走轮的旋转圈数,进而换算出起升高度或行程,或者用激光测距传感器测量起升高度或行程。但在实际工程应用中有以下的缺陷:
- 旋转编码器安装非常麻烦,特别是电缆敷设,工作量较大,工期较长;
- 有些起重机无上述输出轴,需设计专用带有辊轮的旋转编码器驱动机构,结构复杂、安装繁琐;
- 激光传感器价格昂贵,在强电磁环境下易受到干扰,并且性能不稳定,零点漂移现象时有发生;
- 受到信号传输布线空间的约束,编码器或激光传感器的电源和信号电缆需數设在变频器供电电缆的电缆槽内,监测信号受到电磁干扰,严重影响信号稳定性和准确性。

原理
一种新型的基于霍尔开关的辊轮转向和行程测量装置,包括MCU控制器、通信模块、监测显示模块,三个霍尔和沿同一圆周均布在辊轮侧面上的多个磁铁, 三个霍尔依次对应所述磁铁所在的圆周并列设置;所述MCU控制器分别根据三个霍尔的检测信息判断辊轮的转向及计算辊轮的行程,并通过所述通信模块将辊轮的运行状态发送至所述监测显示模块。
使用时,将多个所述磁铁均匀吸附于辊轮侧面的同-圆周上,将三个霍尔开关依次并列设置,实际中三个霍尔通过固设在车身的支架靠近辊轮设置,靠近磁铁,也即第二霍尔开关设置在第一霍尔和第三霍尔之间,通过磁铁触发三个霍尔的顺序判断辊轮的旋转方向,并通过磁铁依次触发三个霍尔的次数计算辊轮1旋转圈数,进而通过圈数计算行程。
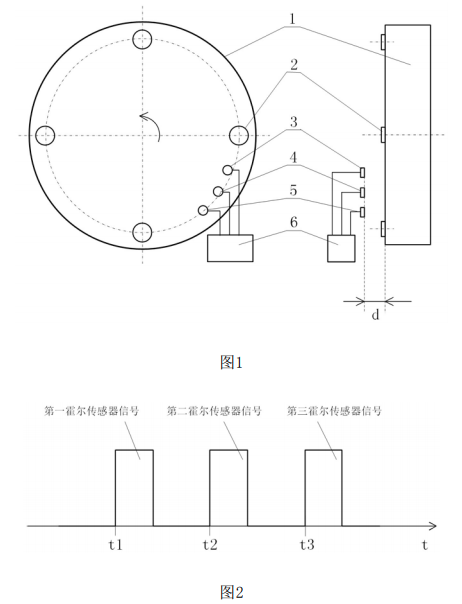
若辊轮1顺时针回转,则第一霍尔开关在t1时刻感应到磁铁,第二霍尔在t2时刻感应到磁铁,第三霍尔在t3时刻感应到磁铁。在t1时刻,所述MCU控制器接收到第一霍尔的感应信号,此时判断没有第二霍尔开关的感应信号标志位,从而做出方向判断。采用三个霍尔的优点在于,三个霍尔开关相互配合,即使在起始时刻有磁铁位于相邻两个霍尔之间,即磁铁位于第一传感器和第二传感器之间或第二传感器和第三传感器之间,也可准确判断出辊轮的旋转方向。
优选地,三个霍尔依次排列的长度小于相邻两个所述磁铁的间距,也即同一时刻只会有一个磁铁触发所述霍尔开关,避免造成错乱。
“推荐阅读”
【责任编辑】: 华芯霍尔元件版权所有:https://www.wxhxkj.com/转载请注明出处






 华芯霍尔元件微信
华芯霍尔元件微信 华芯霍尔元件微博
华芯霍尔元件微博 移动官网
移动官网